
装载机工作机构运动分析
2013-06-23 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
关键字:ug adams cae
根据特殊需要用户化设计装载机工作机构。应用UGNX内嵌的ADAMS解算器,自动生成装载机工作机构动力学数字化虚拟样机模型,提供工作方案论证、详细设计、方案修改、优化全方位、高精度的仿真计算分析结果,从而达到缩短产品开发周期、降低开发成本、提高产品质量及竞争力的目的。
前言:我国装载机始于1960年,至今已经历了三个发展阶段:六十年代仿制摸索阶段;七十年代自力更生研制阶段;八十年代至今是技术引进、合资合作发展阶段。全国装载机产品二十年内增长41.1倍。在全国机械产品中,成为重要代表产品,令世人瞩目。世界上工程车辆的工作机构有六十多种,根据特殊需要用户化设计装载机工作装置,核心技术是建立机构运动的数学模型,用运动函数编写NX能执行的表达式,熟练应用UGNX高级CAD软件。采用UGNX工程分析可以降低工程制造和测试费用,在产品制造出之前,就可以发现并更正设计错误,完善设计方案,在产品开发过程中,减少所需的物理样机数量,缩短产品的开发周期。
一、工作要求
1、装载机的工作条件
装载机主要用来铲、装、卸、运土和石料一类散状物料,也可以对岩石、硬土进行轻度铲掘作业。如果换不同的工作装置,还可以完成推土、起重、装卸其他物料的工作。在公路施工中主要用于路基工程的填挖,沥青和水泥混凝土料场的集料、装料等作业。由于它具有作业速度快,机动性好,操作轻便等优点,因而发展很快,成为土石方施工中的主要机械。
装载机进行施工作业时须与自卸汽车配合,故在施工中装载机的转移、卸料以及与车辆位置的配合好坏都对作业效率影响很大,因此,必须合理地组织施工。装载机的卸载高度和卸载距离须满足物料能卸到自卸汽车车厢中心的要求。

2、工作机构的运动要求:
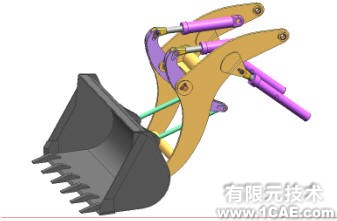
首先我们建立工作机构的力学模型:八连杆机构。
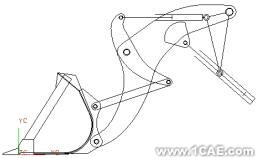
自左至右依次为:铲斗、动臂、拉杆、摇臂、转斗缸活塞杆、转斗缸体、举升缸活塞杆、举升缸体,前车架可视为与地固定,仅为增加视觉效果设置,它不参与运动。
一个完整的工作循环大致可以分为六个步骤
(1)收斗

(2)升举
(3)翻斗
(4)收斗
(5)下降
(6)放平

在工作过程中为了保证额定斗容的有效利用率,须使铲斗开口平面与水平夹角尽可能小,且在整个举升过程中,希望这个角度的变化越小越好。因此,我们所需要做的分析可以仅考查举升过程中铲斗与地面夹角的变化过程,自变量可以选铲斗与动臂铰点的高度值。
二、创建运动模型
1、实体建模:按照产品工程图,建立实体模型。在UG中,模型是由各种特征通过一定的组合关系和位置关系组合在一起的实体。为了建立一个好的零件或产品模型,减少模型编辑过程中相关更新时出现的错误几率,根据零件或产品的加工顺序来作为建立模型中各特征的顺序,采用的特征一般也尽可能采用与加工形状相一致的特征。
2、实体装配:将相关部件装配在一起,对于仅用作运动分析的模型,可省略部分细节,例如垫片、防尘圈、轴套甚至销轴等。与产品的实际装配过程不同,UG的装配模块是一种虚拟装配。将一个零件(或部件)模型引入到一个装配模型中时,并不是将该零件(或部件)模型的所有数据“复制”或“移动”过来,而只是建立装配模型与被应用零件(或部件)模型文件之间的引用(或链接)关系,即有一个指针从装配模型指向被应用的每一个零件(或部件)。一旦被引用的零件(或部件)模型被修改,其装配模型也会随之更新。
3、设置连杆:将相互之间没有相对运动的部件,包括部件内部设置的一些参考曲线在内,一起设在同一根连杆上;可以认为机构就是“连接在一起运动的连杆”的集合。这就很容易理解为何创建机构分析方案的第一步是创建连杆。
创建连杆的第一步是从连杆和运动付(Links and Joint)工具条中选择连杆(Links)图标,见图2-3-2。弹出创建连杆(Link)对话框,见图2-3-3。

图2-3-1设置连杆

图2-3-2 连杆和运动付工具条

图2-3-3创建连杆对话框
创建连杆对话框将显示连杆默认的名字(Name),格式为L001、L002、L003、…、L00n。
编辑名字项按回车键可改变名字。
4、设置运动副:本套机构主要用到旋转付和滑动付;创建运动付的操作分三步:
① 选择运动付要约束的连杆(Links)。
② 确定运动付的原点(Origin)。
③ 确定运动付的方向(Orientation)。

图2-4-1 连杆和运动付工具条及运动付菜单
选择连杆和运动付(Link and Joint)工具条中的图标Joints。或从主菜单中选择InsertàJoint。弹出运动付对话框,见图2-4-1。开始运动付的创建过程。图2-4-2为从模型中隐藏了连杆层,剩下了装载机工作机构的运动付。
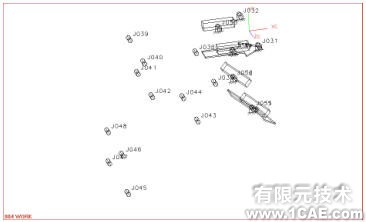
图2-4-2装载机工作机构的运动付
5、设置运动驱动:这是一个平面运动机构,运动动力来自两组油缸(两支举升油缸,两支转斗油缸)通过油缸伸缩,完成装载,卸料工作。
运动驱动是赋在运动付上控制运动的运动付参数。当创建或编辑调用一个运动付时,就会弹出运动驱动对话框,见图2-5-1。
共有5个输入类型:
(1)无驱动
无驱动(No driver):顾名思义,没有外加的运动驱动赋在运动付上。
(2)运动函数
运动函数(Motion Function)是描述复杂运动驱动的数学函数。这里有一个阶梯(STEP)函数的例子,运动付直接按时间和位移之间的相互关系运动,如当时间t1=0
位移x1=0;当时间t2=5,位移x2=20。则描述此运动的数学函数为:STEP (TIME,0,0,5,20)
(3)恒定驱动
恒定驱动(Constant Driver)设置某一运动付为等常运动(旋转或线性位移),所需的输入参数是位移(时间t=0时的初始位移位置)、速度和加速度。
(4)简谐运动驱动
简谐运动驱动(Harmonic Driver)产生一个光滑的向前或向后的正弦运动。所需的输入参数是振幅(Amplitude)、频率(Frequency)、相位角(Phase Angle)和位移(Displacement)。
(5)关节运动驱动
关节运动驱动(Articulation Driver)设某一运动付以特定的步长(旋转或线性位移)和特定的步数运动,所需的输入参数为步长(Step Size)和步数(Number of Steps)。
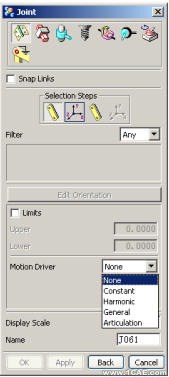
图2-5-1 运动驱动的对话框
由于我们只想得到铲斗转角与它与动臂铰点高度之间的关系曲线,所以我们不妨将油缸设为匀速运动。
三、分析过程
1、建立数学模型
转斗油缸和举升油缸的运动曲线如下图所示:
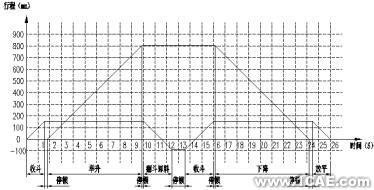
图3-1-1转斗油缸和举升油缸的运动曲线
图中横坐标代表时间t单位是s;纵坐标代表油缸中活塞的位移单位是mm。
观察以上曲线可以看出整个循环过程左右对称,总时间26秒,可以仅分析前13秒,后面的运动参数可由前半部分镜像得出;
数学模型就是运动参数之间的函数关系。函数是集合之间的映射。每一函數都有它的对应规则,這些規則的表現方法至少有三种:表达式、图形、数表。以上转斗油缸和举升油缸的运动曲线就是一种图形函数关系。图形函数关系比较直观,是分析的基础,下面就利用这种直观的图形函数关系建立UGNX能接受并进行解算的运动函数的表达式。
转斗油缸驱动函数为四段分段函数,对于大于两段的分段函数,可采用if语句编写“if(time-1.55:100*time,155,if(time-10:155,155,if(time-12.45:155-100*(time-10),-90,-90)))”。
if语句是运动函数中的条件分支语句。它能将程序的执行路径分为两条。if语句的完整格式如下:
if (condition) statement1;
else statement2;
其中,if和else的对象都是单个语句(statement ),也可以是程序块。条件condition 可以是任何返回布尔值的表达式。else子句是可选的。
if语句的执行过程如下:如果条件为真,就执行if的对象(statement1 );否则,执行else 的对象(statement2 )。
if语句用流程图来表示如下图:
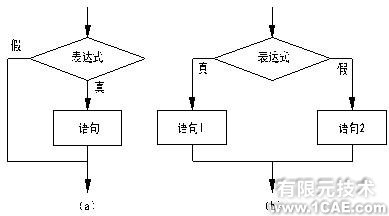
图3-1-2 if语句流程图
举升油缸驱动函数为两段分段函数,可直接调用step函数“STEP( time, 1.8, 0, 9.86, 806)”。所谓阶梯函数,顾名思义,是在一组子区间(定义域的一个分割)内各区间都是常数。
当从运动付(Joints)对话框的运动驱动(Motion Driver)选项中选择一般运动函数(General),则对话框中的函数输入栏及函数编辑部分被激活,见图3-1-3运动付对话框。
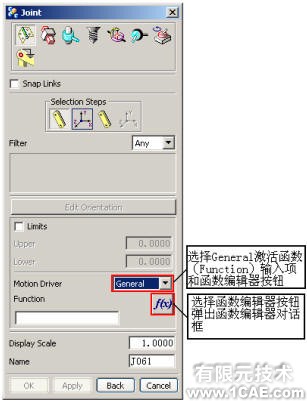
3-1-3 运动付对话框
选择General激活函数(Function)下拉列表框,单击函数编辑器按钮,弹出函数编辑器,见图3-1-4函数编辑器。
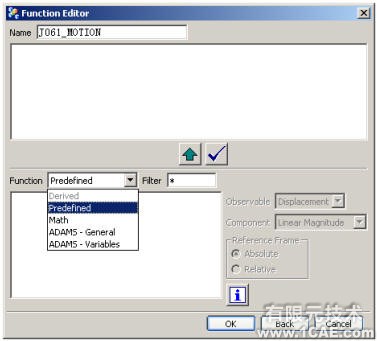
3-1-4 函数编辑器
函数编辑器(Function Editor)是创建运动函数的交互式对话框。当使用ADAMS解算器的运动函数或其他高级数学功能时,本对话框非常有用。
2、ADAMS解算器
UGNX运动仿真模块内嵌了ADAMS解算器。ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
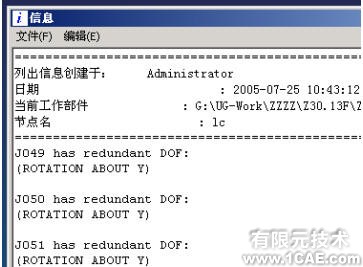
执行“动画”命令解算器开始解算。算完之后,系统会跳出下图所示提示,指出哪些铰点处的自由度欠约束,因为此机构为平面机构,所以在垂直屏幕方向的自由度,不需要计算,可忽略该提示。
四、图表分析
1、电子表格(spreadsheet)
当机构作关节运动或运动仿真分析时,内部即生成一组输出数据表,并驻留在UG内部以便以后利用。在一个关节运动或运动仿真分析进程中,该数据表连续记录数据。而在每一个新的分析进程则重新记录数据。
当调用数据表进行观察时,该数据表显示一组行列表,每一行数据表示关节运动或运动仿真分析的一步。表格中的一列数据代表机构中每个驱动运动付的位移,见图4-1-1。运动过程中获得的电子表格(spreadsheet)设置输出变量:解算完成之后选择,生成图表,将我们所关心的铲斗与动臂连接的铰点(jiont45)的Y坐标方向的位移及该铰点的绝对转角幅值作伪输出变量,输出到电子表格中。
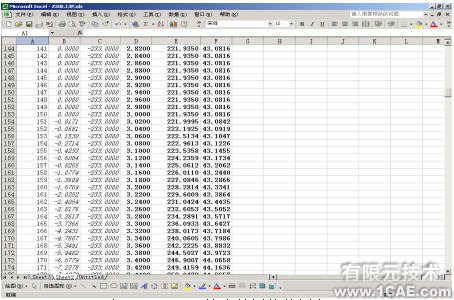
图4-1-1 jiont45铰点的解算数据表
2、绘制图表(graphing)
图表功能(Graphing)生成电子表格数据库并绘出下列仿真结果:位移(Displacement)、速度(Velocity)、加速度(Acceleration)和力(Force)。图表功能是从运动仿真分析中提取这些信息的惟一方法。
与电子表格功能不同(电子表格需要作关节运动或运动仿真分析处理才能生成分析结果数据库),而图表功能本身即是一个独立运动仿真处理器。
有两种方式可以进入图表功能:
① 从Analysis工具条中选择Graphing图标![]() 。
。
② 从下拉式菜单中选择AnalysisàMotionàGraphing,打开分析选项对话框,见图4-2-1。
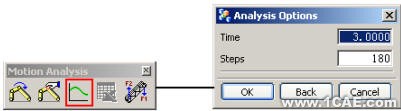
图4-2-1 分析选项对话框
以分析1.8秒到9.86秒的举升过程为例,截取感兴趣的部分表格数据,绘制曲线图如下:
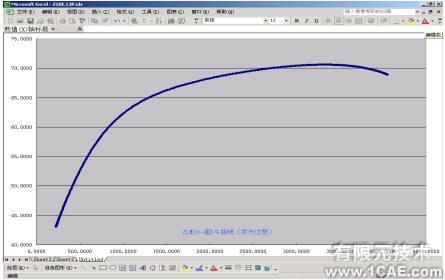
上图即为整个机构,在举升过程中,转斗和地面之间的夹角与铲斗离地面高度之间的对应关系。
3、分析结果:得出了以上的曲线之后,就可以对整套工作装置在举升过程中的运动特性进行较为精确的分析了。
(1)举升过程描述:在离地面高度小于1200mm时,铲斗转动角度变化较大,有利于铲斗装载物料,在离地高度大于1200mm时,铲斗完成装载,离开料堆,进入举升阶段,这时铲斗几乎保持平动,转角变化不大于5°,这样使铲斗在运动过程中不会由于转动而将物料洒落。
(2)可以按照此曲线较为精确地检索在某一高度上铲斗和地面之间的夹角;
(3)采用同样的方法,改变机构中,某个或某些连杆的长度,角度等物理特性,得到不同的曲线,比较他们之间的差异,再根据实际工况的要求,找出各自的优缺点,选出最优的运动方案。分析结果可以指导修改零件的结构设计,如加长或缩短油缸、活塞长度、修改、调整工作周期。设计的更改可以反映在装配主模型的复制品:分析方案(Scenario)中,再重新分析,一旦确定优化的设计方案,设计更改就可直接反映到装配主模型中。
4、动画输出:在最终确定的方案场景名称上右键单击,选择输出动画。输出的动画文件与UG不关联,可以独立地用其它软件编辑,播放。
参考资料
1、洪如瑾编著,《UGNX2CAD快速入门指导》,清华大学出版社,2004/9。
2、胡小康编译,《UGNX2运动分析培训教程》,清华大学出版社,2005/1。
相关标签搜索:装载机工作机构运动分析 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




