
LMS Virtual.Lab在含冲击多体动力学研究中的应用
2013-06-06 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
本文在LMS Visual.Lab Motion平台上建立了含冲击试验台的虚拟样机,在前期虚拟样机仿真分析的指导下,确定了试验台的工作原理和传感器的选择。通过试验台物理样机细化和修改虚拟样机,对比实测结果和虚拟样机仿真结果,修正虚拟样机的一些参数,使它们的动态性能趋近一致。修正后的虚拟样机能够在一定程度上代替物理样机,减少试验的次数,降低成本。
张伟 来源:LMS
关键字:LMS 虚拟样机 物理样机 参数修正 散布度
1. 前言
虚拟样机技术是在计算机硬件和软件技术基础上发展起来的一种机械产品研发技术,极大地提高了机械系统设计和分析水平。研发工程师在计算机里建立机械系统的虚拟模型,分析和评估其动态性能,为机械产品的设计及改进提供指导。这种技术能够降低设计和生产成本,提高设计效率,缩短研发周期。目前这个技术已经被广泛应用于航空航天业、国防工业、工程机械、车辆工程、机械制造业等领域。
考虑到复杂系统多体虚拟样机仿真的可行性,在建立虚拟样机时必须作一些适当的简化,例如忽略温度、装配间隙以及对系统动态性能影响较小的一些零件等等。另外虚拟样机中材料的密度、结构刚度、粘性阻尼系数、摩擦阻尼系数等都不一定与物理样机系统一致。由于虚拟样机结构参数和边界条件的差异可能会导致仿真结果和实测结果不一致,甚至差别很大。因此必须根据实测结果对虚拟样机进行修正,使它的仿真结果和实测结果尽可能的一致,提高虚拟样机的真实度。
本文中设计了一个含冲击的多体动力学试验台,并结合多体动力学软件Virtual Lab建立它的虚拟样机模型。通过对试验平台的虚拟样机仿真结果和实测数据的对比,判断仿真模型的准确性。假定实测数据是真值,修正仿真模型的一些参数,例如阻尼、摩擦系数、刚度和碰撞系数等相关参数,使仿真和实测数据相吻合。
2. 试验台工作原理
在前期简单的试验台虚拟样机仿真分析的指导下,确定了试验台的工作原理和传感器、弹簧、气缸的选择,初步预测了试验台的动态响应,例如传感器在实际的测试过程中并没有超过其量程,弹簧的刚度和气缸的大小都比较合适,使试验台的设计几乎一次成功,同时也验证里虚拟样机技术在机械产品前期设计中的重要性。
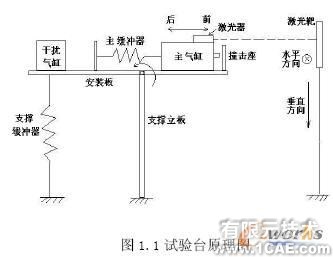
试验台的工作原理如图1.1,试验台的主体部分安装在支撑立板上,并且可以转动,其后端采用一个缓冲器支撑。主气缸和主缓冲器连接,可以在导轨上滑动,活塞在高压气体的作用下前后运动,撞击撞击座和连接筒,使主气缸前后运动和安装板转动。干扰气缸在高压气体的作用下产生水平方向上的力,靠支撑立板的变形使安装板摆动。激光器安装在气缸外壁上,激光束模拟炮弹的弹道射在一个有感光二极管的激光靶上。由于安装板可以转动和摆动,激光斑在激光靶在两个方向上都具有一定的散布度。
3. 试验台虚拟样机的建立
为了保证虚拟样机的真实度,虚拟样机的所有零件模型均按实际零件1:1建模,包括测试系统所需的安装件,因为它们的质量会影响到整个系统的动态响应。
虚拟样机中对气缸的模拟非常重要,气缸是实验台的驱动部件,对系统响应非常大。本文中,首先建立气缸(包括活塞)的零件虚拟模型,保证它们的质量和实际的气缸相同,活塞和气缸之间添加一个移动副,在气缸两端和活塞之间添加两个受后台子程序控制的弹簧力,这两个力模拟气体对活塞的作用力,不考虑气体阻尼及磨擦的影响。由于实际的气体作用力很难测得,不能给虚拟样机直接提供边界条件,只能首先给定一个参考值,这个值是由气体压力乘以活塞面积初步确定,也是可以修改的参数。其实作用在活塞上的气体力不是固定值,是时间的函数,而在虚拟样机中用一个定值来模拟。
对两个缓冲器的模拟也都是采用后台子程序控制的弹簧力模拟,在子程序里可以定义它的刚度、阻尼、预压力等。另外,在气缸两端和活塞之间添加两个碰撞副,主气缸活塞和撞击座之间添加一个碰撞副。
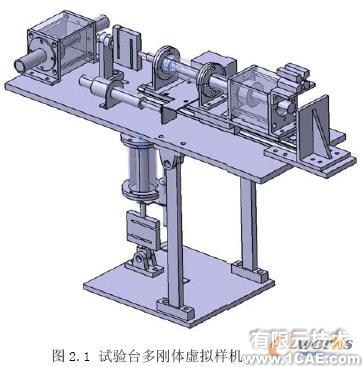
通过零件模型的导入、边界条件和运动副的添加,形成了一个完整的试验台多刚体虚拟样机(如图3.1)。
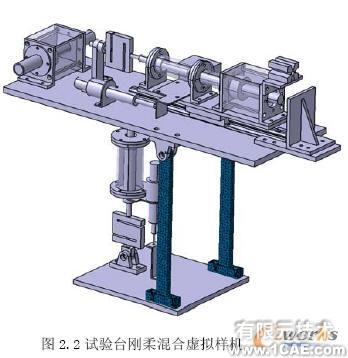
由于没有考虑支撑立板的柔性,多刚体虚拟样机仿真只能得到激光斑在垂直方向的散布度,水平方向上的散布度为0,不能真实反映试验台的动态性能。在多刚体虚拟样机的基础上,考虑支撑立板的柔性,包括传力点的设置、有限元网格划分、计算模态和替换刚体等,形成刚柔混合虚拟样机,如图3.2。
4. 试验台虚拟样机的修正
初始仿真模型的动态特性不一定会和实际的试验系统的动态特性一样,总有或多或少的偏差,这是由于虽然几何模型一样,但是仿真和试验的边界条件不一样,例如装配的间隙,缓冲器的刚度和阻尼,气体作用力,碰撞系数,材料参数均存在着误差,这些参数有些是测试很困难,有些是无法得到的。为了使仿真的结果与试验结果趋近一致,就要根据试验结果对这些不是很确定的参数进行修正。
3.1 虚拟样机参数修改前后与实测结果对比
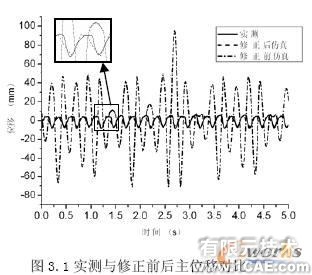
图3.1是主位移(主气缸在导轨上的位移)在虚拟样机修正前后和实测结果的对比,图3.2是激光斑效果在虚拟样机修正前后和实测结果的对比。
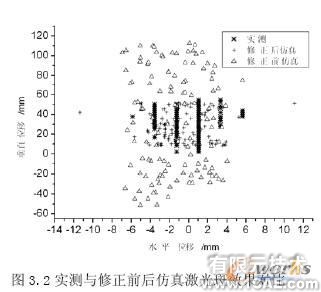
从图 3.1 可以看出,与实测结果对比,修正后的虚拟样机仿真结果比修正前的结果有很大的提高。修正后的主位移和实测位移拟合程度较好,幅值基本一致,相关系数由 0.5321 提高到 0.9073,相关系数表示两个结果在时间历程上的近似程度。图 3.2 中,修正的效果更为明显,利用散布度量化修正的效果更为合适,如下表 3.1。

从表3.1可以看出,在水平方向上修正前的误差为30.93%,修正后为3.64%;在垂直方向上修正前的误差是274.3 %,修正后为7.53 %。从散布度和修正结果的息义上看,修正后的误差控制在10%以内,实现了修正的基木目的。
3.2虚拟样机参数修正
初始的虚拟样机与试验台的差距较大,必须参照试验台的测试结果对虚拟样机进行修正,而修正的对象就是虚拟样机中一些无法确定或很难获得的参数。有些参数是比较容易获得的,例如卞缓冲器和支撑缓冲器的刚度,就是通过实测直接添加到虚拟样机里的,得到一个虚实混合的虚拟样机。但是修正那些参数和如何修正是一个值得研究的问题,木课题在对曲柄滑块机构模型修正等研究的基础上,结合试验台的特点,对一些关键参数作了一些修正。修正的参数和修正前后的对比见表3.2
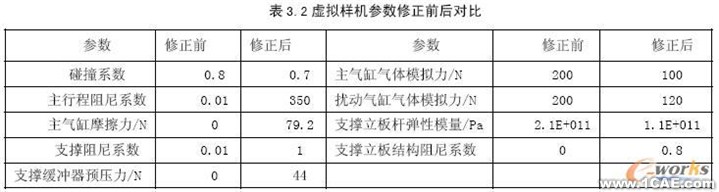
表3.2中的参数都不同程度上影响到虚拟样机的动态响应,碰撞系数卞要影响到碰撞过程中能量的损失和碰撞力的大小,对十卞气缸还影响到其行程。卞气缸和扰动气缸气体模拟力的初始定值200N是由实际的气体压力和活塞截ICI积乘积,其实这个力比较复杂,修正后这个力分别为100N和120N。
修正前两个缓冲器均没有考虑预压力,其实在装配时一就存在一定的预压力,修正后分别为79.2N和44N, 它们主要影响到系统的固有颇率,关键是这个颇率要和激励颇率匹配,伸系统响应认到一个态平衡,不能发散。卞行程的阻尼系数由初始的0.01修正为350,变化很大,因为’已卞要影响到卞气缸的行程和系统的固有频率。
激光斑水平方向上的散布度卞要靠支撑立板的变形产生,立板的材料为刚,其弹性模量的初始值为2.1E+O11Pa,经过修正后’已的值几乎减小了一信,失去了’已的物理息义,原因在十虚拟样机没有考虑到支撑立板和安装底板的间隙,而是利用立板柔性的增加来补偿间隙对系统响应的影响。立板的刚度降低了,反而激光斑的散布度降低了,这是由十干扰气缸气体模拟力同时一也降低了。另外,立板的结构阻尼系数由0修正到0.8,也在一定程度上降低了激光斑的散布度。
5.总结
在虚拟样机仿真分析的指导下,设不l一的试验台测试结果基木符合设不l一要求,根据实际的试验台细化虚拟样机得到多刚体虚拟样机,将试验台的薄弱构件支撑立板柔性化,建立试验台的刚柔混合虚拟样机。在实测数据的基础上,确定需要修改的虚拟样机参数,采用摄动法进行参数修正,得到一组较优的参数组合,使虚拟样机的仿真结果和实测结果有较好的一致性,提高了虚拟样机的真实度,达到了修正的基木目的,使虚拟样机的应用在一定程度上可以减少物理实验的次数。
相关标签搜索:LMS Virtual.Lab在含冲击多体动力学研究中的应用 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




