
基于Solidworks的擦窗机参数化建模
2013-05-19 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
简要阐述了参数化建模的意义和Solidworks三维建模软件的功能,并以轨道式悬臂擦窗机为例,介绍利用Solidworks软件来实现擦窗机参数化建模的思想和方法。
作者: 刘振中*刘晓婷 来源: 万方数据
关键字: 擦窗机 Solidworks 参数化建模
作为现代高层建筑必需的维护设备之一,擦窗机得到了越来越广泛的应用,其结构型式根据建筑物的高度、立面形式及楼顶结构、承载能力、设备行走的有效空间等来确定,要求擦窗机进行参数化设计,形成系列化产品。
1参数化建模技术及其软件
参数化建模属于参数化设计的一部分,参数化设计(也叫尺寸驱动)是CAD技术在实际应用中提出的课题,它有一种驱动机制被称为参数驱动,通过参数驱动,可以对图形的几何数据进行参数化修改,在修改的同时还要满足图形的约束条件,从而实现对同一型号、不同尺寸的机械产品的建模。目前参数化设计是CAD技术应用领域内的一个重要且待进一步研究的课题。利用参数化设计手段开发的专用产品设计系统,可使设计人员从大量繁重而琐碎的绘图工作中解脱出来,大大提高设计速度并减少信息的存储量。
三维设计软件Solidworks是当今基于NT/Windows平台的三维机械设计软件的主流产品。软件的建模技术采用基于特征的参数化实体建模,具有强大的实体建模功能和直观的用户界面,设计与绘图是在同一界面下同时进行的。Solidworks的特征造型采用拉伸(Extrude )、回转(Revolove)、扫描(Sweep )、放样(Loft) 4种基本形体的生成方法,同时提供了倒角、抽壳、阵列、镜象等功能。
利用Solidworks实现从三维实体造型到零件的虚拟装配、运动仿真以及结构设计等机械设计的各个环节,可以极大提高设计质量和设计效率。它具有全面便捷的三维装配设计和零件设计功能,并能快速生成指导生产的图纸,已经成功地用于机械设计、机械制造、电子产品开发、模具设计、汽车工业和产品外观设计等方面。
2擦窗机参数化建模
擦窗机由行走机构、起升机构、回转机构、变幅机构、悬吊工作平台以及电控系统等组成,其结构和形状较为复杂。Solidworks中对于这类产品的建模思路是将整个产品分为多个特征,通过特征之间的布尔运算逐步得到完整准确的模型。具体操作中,往往将整个产品中最主要或者最大的部分视为基本视图(或称为基体),其他部分作为添加特征,以搭积木的方式,在基本特征的基础上,通过添加、去除和求交等布尔运算最终得到整个模型。
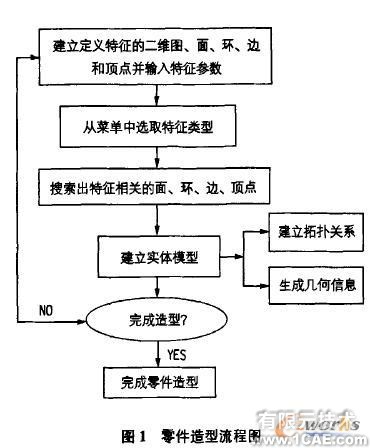
三维实体特征建立的基本思路是从二维到三维的过程,造型流程如图1所示。
擦窗机主要由6部分组成,从下向上依次为导轨、底座支架、底座、伸缩臂、吊篮撑架和吊篮,以下依次叙述建模方法。
2.1导轨
导轨是擦窗机在建筑物顶端行走的轨道,通过擦窗机的环型行走路线,可以清洁和维护建筑物四周的任何一个角落。轨道根据建筑物顶端的结构和面积铺设,其截面为工字钢。
导轨的建模方式比较简单,它由若干部分连接而成,每一部分底部的两翼有带螺栓孔的小钢板,可以通过螺栓跟地面连接。建模时,先在右视基准面建立工字形的草图,然后通过拉伸生成,转弯的地方为有引导线的拉伸,其引导线为一个45°的曲线。图2为生成的部分导轨模型。
2. 2底座支架
底座支架的上部用来支承底座,其下部有4个轮子,可以在导轨上运动。底座支架类似汽车的底盘结构,两侧的方柱形结构是通过在前视基准面建立矩形草图,然后通过多次"拉伸",最后"抽壳"而形成的。中间部分与底座相连,其上部圆周排列的孔不必一一建立草图,可以通过"圆周阵列草图"形成,然后沿同一方向进行"拉伸"而形成。
底座支架的零部件虽然比较多,但是各零件的建模方式无外乎Solidworks中基本的拉仲、抽壳、阵列、扫描等操作。图3为建立的擦窗机的底座支架模型。

2. 3底座
底座用于支承擦窗机的伸缩臂,安装回转机构,通过电机和齿轮传动机构带动伸缩臂回转从而使工作人员在吊篮中可以维护建筑物表面的任何一个角落。
图4中齿圈为底座的一个主要零件,它为标准直齿圆柱齿轮,在建模过程中分为2个步骤,第一步是生成齿轮毛坯,可以采用3种方法:拉伸生成法、拉伸切除生成法、旋转生成法;第二步是生成齿轮齿形,可以采用2种画法:圆周阵列草图法、圆周阵列生成法。

2. 4伸缩臂
伸缩臂是擦窗机中很重要的一个部件,它可以根据建筑物的形状调整长度,并通过其内部的钢丝绳和滑轮实现吊篮的升降。
伸缩臂各部分的零件结构都比较简单,臂主体的形成利用最基本的"拉伸"、"拉伸一切除"等操作,其中对臂架有支撑作用的筋版可以利用"镜象实体"的方法节省建模步骤,图为伸缩臂模型。

2. 5吊篮撑架
吊篮撑架是支承吊篮的结构,可以通过滑轮和钢丝绳实现对吊篮升降的控制。撑架的后端通过螺栓连接在伸缩臂的端口,张开的两翼顶端各有一个小滑轮,伸缩臂内部的钢丝绳通过小滑轮连接到吊篮上,起到吊篮的悬挂支承和升降控制的作用。
图6是吊篮撑架的装配模型,要注意的一点是中间连接部分是由螺栓固定的,其建模仍然是采用"圆周阵列草图"的方式完成。

2.6吊篮
吊篮的形式比较简单,而且它的样式也比较灵活,可以根据工作环境不同而设计不同样式的吊篮,设计的重点是要保证工作人员工作环境的舒适性和操作的安全性,这里不再赘述。

3擦窗机整体装配
擦窗机各零件的装配过程遵循机械零件装配的一般原理,从零件到组件、从组件到部件,最后生成装配体。本文采用自下而上的方式,各部件之间从导轨向上环环紧扣,结构紧凑。要注意的一点是装配过程中的配合问题,也就是说在擦窗机工作过程中是否要求2个零部件之间有相对运动,各零部件之间是问隙配合还是过盈配合,这将影响到擦窗机的整体运作。图7为擦窗机各主要部件装配一起的总装配模型。
本文以Solidworks为设计平台,介绍了擦窗机的一种参数化建模的思想和方法。随着擦窗机日益广泛的应用,对提高设计工作效率、减少重复设备,具有参考价值和现实意义。
相关标签搜索:基于Solidworks的擦窗机参数化建模 SolidWorks培训课程 SolidWorks设计教程 SolidWorks视频教程 SolidWorks软件下载 SolidWorks在建筑室内设计工业设计的应用 SolidWorks基础知识 SolidWorks代做 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训




