
旋转机械振动常用术语——相位:详解及其应用
2017-05-04 by:CAE仿真在线 来源:互联网
来源:摘录自阿尔斯通创为实技术发展(深圳)有限公司沈立智的《大型旋转机械状态检测与故障诊断讲义》
相位是在给定时刻振动体被测点相对于固定参考点的位置,单位是度[°]。
相位是振动在时间先后关系上或空间位置关系上相互差异的标志(例如同一部件不同位置处的振动或不同部件之间的振动),相位在判断振动故障的类型中有着非常重要的作用,在动平衡技术中更是必不可少。
把转子旋转一圈的时间看成是360°,两个振动之间的相位差就是转过此角度的时间差。通过角度不仅表示空间、而且表示时间,这便是相位的奥妙之处。
键相器是由探头(如涡流式、光电式等)与轴上固定标志(如键槽、凹孔、反光板等)所组成的相位测量仪表。
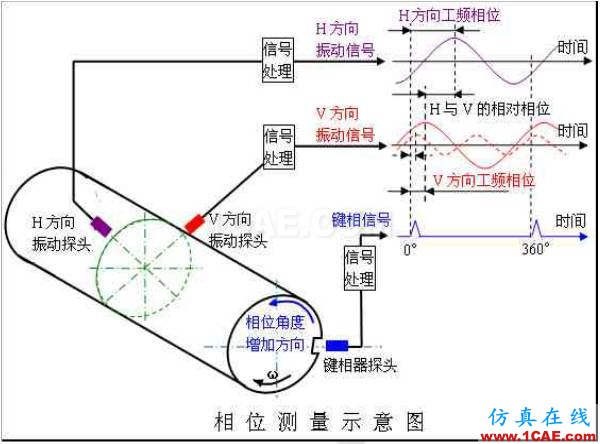
当轴上固定标志经过键相探头时,键相器便会触发一个脉冲信号,脉冲信号是确定各测点(如1H、1V、2H、2V…)、各选频振动(如工频、二倍频、0.5倍频…)相位的基准,脉冲频率与转子旋转频率完全同步。
绝对相位是指从键相器脉冲信号触发到各选频振动信号第一个正峰值之间的角度。
绝对相位是具体测得的相位,习惯上简称相位。说“某测点、某频率的相位为某某度”指的就是绝对相位,也就是相对于轴上固定标志通过键相探头的那一时刻及位置,此频率的最大振动与该测振探头之间的角度。
如果没有指明,相位角度增加的方向总是与转子的旋转方向相反。
由键槽和键相探头的位置及转子旋向,绝对相位还能给出最大振动具体的空间方位。例如,在上图中,由于在H点测得的工频相位为45°,V点相位为135°,因此,工频的最大振动方位(即转子与测振探头距离最近时的角位置,又称高点)与轴上键槽的夹角为180°。而且,再进一步,还可以根据转速以及转子状况指出不平衡量(又称重点)的具体方位,例如刚性转子高点与重点大致在同一方向,挠性转子在高于并远离临界转速后高点与重点相差180°。
相位差是两个振动的相位之差。
相对相位是两个选频振动信号波形最近对应点(如正峰与正峰)之间的角度。
在实际应用中,往往并不讲相对相位,而只讲相位差,是因为实际上已经将相对相位所强调的“最近的对应点”溶进了相位差中。例如,假设H点、V点工频相位分别为3°、358°,它们之间的相位差既可以讲为355°,也可以讲为5°,而讲相位差为5°可能更使问题清晰。
通过相位(差),可以很具体地想象到两个振动矢量在时间和空间上的相互关系:
-
谁先谁后:相位小的在先、称超前,相位大的在后、称滞后,因为相位小的先到达第一个正峰、即最大振动点处;
-
相差的时间t:t=相位差×周期/360=相位差/(工频×360),实际中很少算,主要是由相位差(角度)的大小想象两者间隔时间的长短;
-
空间位置:相位差就是空间方向差夹角的角度。
相位差表面上看是一个角度,实际上是反映了两个振动在时间先后关系上或空间位置关系上,是否存在差异、存在什么差异、存在多大差异。在分析振动原因和判断振动故障类型时,往往更关注相位差,而不是相位。
例如,对于工频异常的振动故障,在分析振动原因、区分故障类型时,相位差可以更清晰地表明振动过程中各位置处的相互关系。仍然拿上图中测得的工频相位来说,测点H处的相位为45°,测点V处的相位的为135°,H点处的振动超前 V点处90°,俩测点的相位差为90°,表明H、V处的最大振动不同时,相差的时间正好是转子转过俩测点的时间(俩测点相互垂直,正好是90°),很可能是不平衡问题;另外,假设H点、V点工频相位都为0°,那么则表明在H点、V点测得的工频最大振动是同时、同方位的,此工频的最大振动方位始终在垂直方向的上方,与键相探头成90°夹角,因此,肯定不可能是不平衡问题,而可能是轴承的间隙或刚度、或支承刚度在垂直方向上有问题。
当两个振动的相位相同、即相位差为0°(或360°)时,则称此两振动为同相振动。
当两个振动的相位相反、即相位差为180°时,则称此两振动为反相振动。
同相振动、反相振动十分清晰地表明了两个振动在时间和空间上的相同或相反的相互关系,因此常用来说明同一振动不同测点之间、不同部件之间的这种相同或相反的特殊关系。例如确定具体的振型、不对中类型等。
相位的应用
相位在振动领域有着许多重要的应用,主要用于比较不同振动运动之间的关系,比较不同部件的振动状况,比较激振力与响应之间的关系,确定不平衡量的方位,等等,例如:
(1) 比较同频率振动在时间上的先后关系
例如,在简谐振动的弹簧质量块系统中,当质量块向上振动、通过0点时,位移为零,速度为正方向最大,加速度为零;在质量块由0向上的过程中,位移为正、变大,速度为正、变小,加速度为负、变大;当质量块振动到上限位置时,位移为正方向最大,速度为零,加速度为负方向最大;当质量块向下通过 0点时,位移为零,速度为负方向最大,加速度为零;当质量块振动到下限时,位移为负方向最大,速度为零,加速度为正方向最大。依此关系,可画出三者的振动波形图,得到三者之间在相位上的以下关系:
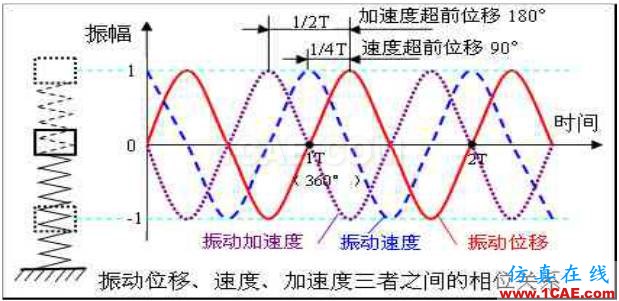
简谐振动中,振动速度超前振动移位移90°,振动加速度超前振动度速度90°,振动加速度超前振动位移180°。
再例如,同为工频振动,由于产生的原因不同,两个相互垂直的探头测得的相位差是不一样的:由不平衡引起的工频振动,相位差应该等于或接近于90°;而由轴承偏心类、支承刚度异常类引起的工频振动,相位差则无此关系。
(2) 比较激振力与响应在空间上的相互关系
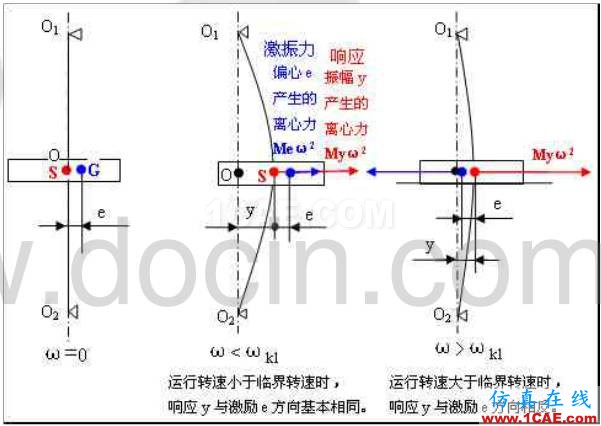
例如,运行转速小于临界转速时,转子因不平衡质量偏心e产生的离心力、即激振力Meω²,与所引起的响应、即振动矢量y方向基本相同。其中,慢转速(300~600r/min)下激振力与响应的相位完全相同;大于慢转速后,随ω增高,激振力Meω²增大,引起响应y随之变大并超过偏心距e,由y产生的离心力Myω²也就比激振力Meω²大。离心力属惯性力,离心力越大、惯性就越大。响应Myω²因为惯性大会跟不上激振力Meω²的变化而滞后,于是激振力与响应之间有了相位差,而且相位差随转速增高而增大。
在通过临界转速时,两矢量的相位差达90°,方向发生翻转变化,此时振幅y达最大。大于临界转速后,转速越变越高,激振力与响应之间的相位差越变越大,远离临界转速后两矢量为相位差为 180°,激振力与响应方向完全相反。在此过程中,转子受到的离心合力逐步变小,振幅y逐步变小、趋近于偏心e,质心G趋近于几何中心O,此即所谓挠性转子的自动定心。
不平衡矢量与振动响应(此响应为工频振动)之间的相位差会随转速而变,远离临界转速后相位差趋于180°,变化趋于不明显。也就是说,工频的相位与不平衡量有关,并且随转速而变,远离临界转速后变化不明显。如果转子的平衡状态发生改变,如损伤脱落、结垢,质心的角位置必然变化,工频的相位也随之改变;因此,联系转速看工频相位是否发生变化是判断不平衡故障的重要手段。
(3) 比较两个部件或多个部件之间相对运动的方位
如刚性联轴器,平行(径向)不对中时两侧轴承径向振动的相位差为180°,角度(端面)不对中时两侧轴承径向振动的相位相同;带中间短接的不对中齿式联轴器不对中时两侧轴承径向振动的相位差为180°。
再例如由基础或底座松动引起的振动、尤其是结构共振,整个机组上各个测点的振动相位都是相同的。
(4) 确定转子振型
对刚性转子,两端轴承振动相位同相为圆柱形振动,反相为圆锥形振动。
对挠性转子,两端轴承振动相位同相为一阶振型、三阶振型、…, 反相为二阶振型、四阶振型、···。
(5) 在转子动平衡中更有着必不可少、十分重要的作用
另外,需要提醒一下,在大机组在线状态检测系统中,如果不设置键相器,就无法获得相位信息,许多有价值的振动分析图谱将难以生成,经专业技术处理后显示的某些基本图谱(如频谱图),也会因转速波动、不平衡不明显等客观原因而存在瑕疵,会给故障诊断带来困难;在机器存在两个或两个以上不同转速的轴系时,转速不同的轴系应设置各自独立的键相器。
相关标签搜索:旋转机械振动常用术语——相位:详解及其应用 Pumplinx流体分析培训课程 Pumplinx旋转机构仿真分析 Pumplinx培训 Pumplinx学习教程 Pumplinx视频教程 Pumplinx软件下载 pumplinx流体分析 Pumplinx代做 Pumplinx基础知识 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训




