
一新型机电限位机构的仿真分析
2013-06-17 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
大型光电跟踪测量设备在现代化靶场中是获取外弹道数据和飞行状态的最基本的测量手段之一,主要是采用地平式两轴结构跟踪架,水平轴和镜筒安装在垂直轴上,通过水平轴和垂直轴的转动来实现0-80°。半球面范围的目标跟踪和轨迹测量。传统的光电跟踪测量设备中,为保护镜筒,水平轴安装有液压限位机构,而垂直轴可以连续旋转,没有限位机构。在某一大型光电跟踪测量设备中,根据系统的使用要求,为了保护信号电缆导线不被破坏,研制了一机电式限位机构,此限位机构能够实现垂直轴系第一次能够通过回转零点,而第二次被限位,实现了700°.的转动范围内垂直轴系的自由旋转。
限位机构的安装位置和性能要求决定了其结构比较复杂,尽管设计人员在设计中已经过仔细的分析和反复推敲,但对于机构工作的可靠性,设计、加工装调带来的误差大小以及是否会出现设计阶段来预料到的问题等仍然没有十分把握,另外限位过程中碰撞对相关零件的影响也是无法估测的,接传统方法只有等样机试制出来,通过破坏性实验来获得 。若利用CAD/CAE 软件对该限位机构进行运动仿真和有限元分析,检查限位过程中限位机构中零件间的干涉情况,观察相关零件和机构关键部位的变形和应力图,就可以使设计人员在设备加工前对机构中潜在的问题进行改进和优化。
1 限位机构的结构和工作原理
限位机构主要有移动座、缓冲弹簧、滑动撞块、V 形挡块、固定座、挡块定位组件等组成,如图1 示。
移动座安装在转台上,大小弹簧安装在移动座的两个移动撞块之间,随转台一起转动,固定座和V 形挡块固定在基座上;垂直输系可以通过限位零点(第一次), V 形挡块的右挡角翘起;当垂直输系旋转第二周到达限位零点时与V 型挡块碰撞,进行限位,垂直轴系最大可以连续旋转700°。机构的设计主要是对缓冲弹簧和V 型挡块的设计,机构具体工作原理和设计理念,限于篇幅,将在另外的文章中做详细介绍。
2 限位机构的运动仿真
根据机构的设计图纸利用UG 中[Modeling] 模块进行建模,利用[ Assembly] 模块根据零件间的位置关系进行装配,限位机构的三维模型如图2 示。
利用UG 进行运动仿真主要有两种途径叫:
(1)直接利用UG 的机构运动模块[ Mechanism] 对机构进行运动仿真。
(2) 通过修改装配(或零件)参数或重新定位零件进行运动仿真。
在这个运动仿真中,移动组件随转台一起转动,转台内部的结构比较复杂,利用第一种方法进行运动仿真,会使仿真变的比较烦琐,并且主要考虑的是V 型挡块和移动组件间在限位过程的相互位置关系,要观察他们之间的子涉情况,因此利用第二种方法通过修改装配参数来进行运动仿真。在这个运动仿真中,修改滑动撞块和V 型挡块之间的距离,重新定位滑动撞块来进行运动仿真。通过运动仿真主要发现有以下几个问题:
(1)在限位过程中,滑动撞块与V 型挡块要进行碰撞,碰撞时他们之间的相互位置图如图3 示。从图中可以看出碰撞时撞偏了,对于大型光电设备,转动惯量很大,这样碰撞不但不能进行缓冲限位,还会对限位机构造成破坏;
(2) 在垂直轴第一次通过限位零点和第二次缓冲限位过程中, V 型挡块要与移动座发生严重的干涉;
(3) 在转动过程中,固定座外面的护盖要与转台发生干涉。通过对以上运动仿真中出现的问题进行分析, (1) , (2)两点主要是由V 型挡块的位置与滑动撞块不协调引起的,只要适当的沿基座的径向向外移动V 型挡块使之达到滑动撞块的位置,就能解决这两个问题。因此在固定座和基座之间添加了一个10mm 厚的弧形垫板,此时进行运动仿真,除了V型挡块和移动座内壁有轻微的干涉外,其他部位都能顺利通过。这样即使在实际加工装配后由于误差引起干涉,可以调节V 型挡块两边的两个2mm 厚的垫圈,并且可以对V 型挡块发生干涉部分进行轻微的手工修磨。固定座外安装的护盖主要是保护挡快和美观的作用,只要减小其上边极面的伸出尺寸,问题(3) 就能解决。
3 限位机构及其相关零件的有限元分析
3.1 缓冲限位载荷的简化
利用UG 中[ modeling]模块对整个跟踪测量设备进行建模,利用UG 中[ Analysis] 模块计算出转动部分(包括转台水平轴系和镜筒等)的质量M 和转动惯量I 。在缓冲限位过程中,弹簧的压缩最大不会超过80mm ,对一个半径为784mm 的圆来说,这只是很小的一段,为了求解的方便,把缓冲这一段简化成一直线的减速运动,即把转动部分的质量完全转化在弹簧的位置,
![]() , I为系统的转动惯量,所以
, I为系统的转动惯量,所以![]() ,式中, s 为弹簧的压缩量;
,式中, s 为弹簧的压缩量;
F 为弹簧的压力, F=Ks;由于两个弹簧并联, K=k1+k2,k1、k2, 分别是大、小弹簧的刚度,因此得:
由此可以得出作用力与时间的关系,并根据垂直轴系限位前的初速度得到参数c 1 、c2, 以及缓冲载荷的作用时间。
3.2 限位机构的有限元分析
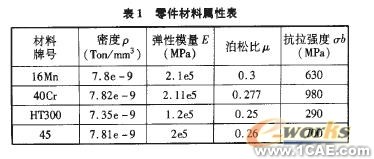
在得到缓冲载荷与时间的关系后.就可以分别对移动组件和固定组件进行瞬态动力学分析,这样既简化了模型,又减少了计算代价。结构动力学分析是MSC. Nastran 的强项之一,因此利用MSC. Patran/Nastran 来对限位机构和相关零件进行有限元分析。分析时各个零件的材料属性如表1 。
(1)固定组件的有限元分析
在对固定组件进行有限元建模时,除了对影响不大的螺纹孔和倒角进行简化外,也忽略了对分析中没有什么影响的护盖和挡块定位组件。对于各个零件间的接触装配关系根据经验和零件间的作用力传递关系对节点进行合并或用MPC( Multi - Point Constraint) 进行连接。设定边界条件时,除了限定固定座和基座连接的螺钉上节点的自由度外,也对接触面上一些节点相应方向的自由度进行约束。
垂直轴系达到的最大转速时,限位机构在这时限位承受的冲击力最大,图4 是固定组件限位时的应力变形图。固定座和基座连接的螺钉的应力最大,超过材料的抗拉强度约50% .但由于仿真没有确切的考虑固定座和基座之间的接触和摩擦力,所以实际情况下螺栓的应力要小于仿真结果。但从仿真中可以看出螺栓组之间应力的分配,对承受应力比较大的两边的螺栓进行加强。固定组件中的另一个薄弱环节是连接轴,在仿真中可以发现它的最大应力仅为300Mpa ,远远小于材料的抗拉强度。

(2) 移动组件的有限元分析
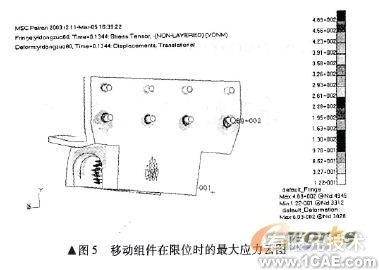
移动组件主要有移动座、大小弹簧和滑动撞块组成,在对移动组件进行有限元建模时,主要是要考虑移动座和转台之间的连接螺钉的强度,而缓冲载荷由弹簧通过滑动撞块传递到移动座上,因此只对移动座和连接螺钉建模,螺钉和移动座间通过节点的合并来传递作用力,通过限定螺钉上节点的自由度来设定边界条件。在最大速度限位时,移动组件的应力变形图如图5 。从图中可以看出,载荷主要有下面的螺钉承担,而两边的螺钉承受的应力最大,但最大应力为489Mpa,小于材料的抗拉强度。并且在实际中考虑到螺钉的预紧、移动件和转台之间的摩擦力,螺钉承受的应力要比仿真结果小。
3.3 其他相关部件的有限元分析
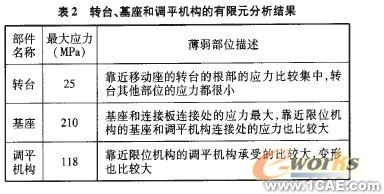
在进行限位过程中,冲击力还会对转台、基座和调平机构等部件的精度造成影响,有时可能是破坏性的,而转台、基座和调平机构的精度直接关系着光电设备的跟踪测量精度,因此对相关部件进行有限元分析确定冲击对其的影响是十分有必要的。分别对转台部件和基座组件进行有限元建模,在对垂直轴系最大速度限位的情况下分别进行分析,分析结果如表2 示。作用下,承受的最大应力都小于材料的抗拉强度,在材料的弹性的变化范围内,因此限位机构限位时不会对设备其他的部件造成破坏,对设备的精度影响不大。
4 结论
常规的转向限位机构最大只能有(0 - 360°)的旋转范围,而这种新型机电限位机构能够实现(0 -700°)范围内垂直轴系的自由旋转,因此在结构和原理上都要比常规的限位机构复杂的多。利用CAD/CAE 软件分别对该新型限位机构进行运动仿真和有限元分析,根据运动仿真和有限元分析结果,对机构进行了相应的改进。通过仿真结果可以发现,这种新型限位机构机构工作可靠,对整个设备精度的影响很小,可以满足系统的使用和性能要求。该限位机构己成功应用于大型光电设备,在设备工作过程中该机构能够为设备主控系统提供旋转轴的当前位置和到位信息,并且利用该限位机构进行限位碰撞后,对设备的主镜光路系统、垂直输系以及调平机构等相关结构的精度影响不大。
相关标签搜索:一新型机电限位机构的仿真分析 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




