
五轴混联机床运动学和动力学仿真
2013-06-16 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
3-TPS混联机床为五自由混联机床,该混联机床是以并联机构为基础,采用串联约束的一种新型并联机床。混联机构通常是一个多自由度、多变量、高度非线性、多参数祸合的复杂系统。连杆速度和驱动力是设计时必须考虑的重要指标,它直接关系到驱动电动机参数的选择和零件设计,难以用普通的方法较准确地分析各个连杆速度和驱动力的变化。而ADAMS软件却能解决这一复杂问题,它能根据机械系统模型,自动建立系统的运动学和动力学方程并加以求解。因此运用仿真的方法分析混联机构运动时连杆的驱动力和速度具有重要的意义。
1 、3-TPS混联机床机构特点
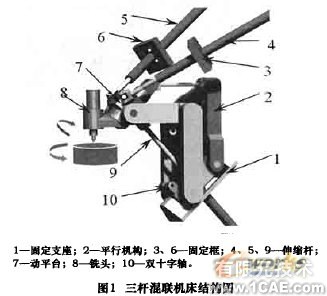
该机构如图1所示,由三个并联的伸缩杆组成,各杆分别与固定铰支座(固定平台)以虎克铰联接与动平台相联。
当三杆根据加工要求分别伸长或缩短时,使动平台具有x,y,z,y'四个自由度。若再在旋转刀具的下方安装一个数控回转工作台,此机床即可以实现五面体加工。如果再配置自动换刀机构,该机床将进化为台五轴联动加工中心。
2.混联机床三维模型建立及参数化
2.1建立三维模型
目前工业界的CAD/CAM软件有很多,譬如proe、UG,但是基于Windows的SolidWorks充分利用了有广泛群众基础的Microsoft Windows图形用户界面。同时该软件也完全支持参数化设计,使得机械设计工程师能快速地按照其设计思想绘制草图,尝试运用各种特征与不同尺寸,以及生成实体模型,接近于实际物体。另外与ADAMS软件有很好的接口,导人方便,因此本文的模型采用SolidWorks建立。
首先根据机床设计的指标和图纸,在三维软件SolidWorks里进行三维建模、装配等一系列过程,然后以Parasolid格式将三维模型的几何、质量和约束等关系导人到ADAMS软件中。在图形文件交换时采用Parasalid格式可以防止数据丢失,这对仿真结果的正确性和有效性有重要的影响。
2. 2模型的参数化
通过参数化建模,可以在参数设置中改变其变量。在分析过程中,只需改变样机模型中有关参数值,就可以自动地更新整个样机模型。机床三维模型以Parasalid格式导人ADAi41S/View后,先需要添加零件的材料,修改零件名称,零件之间的约束关系(移动副,转动副,铰接,球接,固定),然后在刀尖添加驱动Generalmotion。打开ADAMS/View的自检结果表,检查所添加的约束关系和自由度是否正确,先对仿真模型进行相应修改,调整相应结构、装配位置、零件之间约束关系,然后进行反复的仿真分析和数据处理,最终得到满意的虚拟样机模型。
3混联机床运动学和动力学仿真
混联机床运动学和动力学仿真,就是刀尖按照某种切削路径运动,计算各构件的速度、加速度和受力情况,检查各机构的相对运动状态,是否发生干涉,考察和评价系统的速度和动力特性。
在仿真三杆速度和驱动力时,铣削加工可分为两种情况:第一种是空载,根据机床刀具以最大速度为0.5 m/s和加速度运动为1g时,测得井杆最大速度和驱动力;第二种是刀具匀速进给v=0.4 mls,同时受到铣削力的作用。铣刀选择立铣刀,工件材料:碳钢,根据经验公式

经过计算和仿真可知第一种的驱动力大于第二种驱动力,所以研究第一种情况是有重要参考价值的。
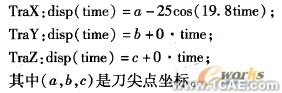
现在以第一种情况进行仿真,图2是刀具的最大速度(0.5 m/s)和加速度(1动是以正弦和余弦曲线进给。在ADAMS中给定位移运动方程以刀具沿X方向运动为例,进行设置如下:
在进行运动学和动力学仿真时,刀具在不同的位置和进给方向,各个杆都会产生不同的速度和驱动力。
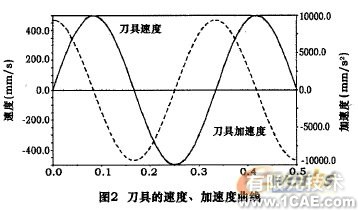
机床在极限条件下进行进给,并使刀具走遍工作空间内的所有点,各杆件速度和驱动力的最大值,就是所需的最大速度和驱动力。工作空间(400,400,400)如图3所示,单位mm.
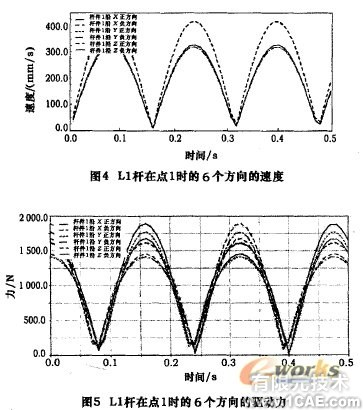
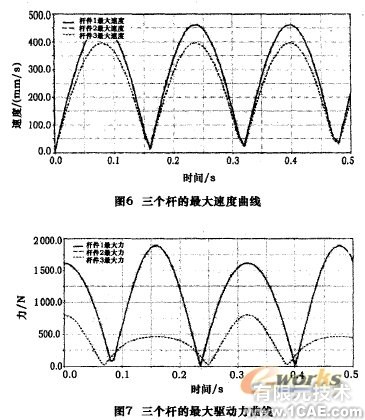
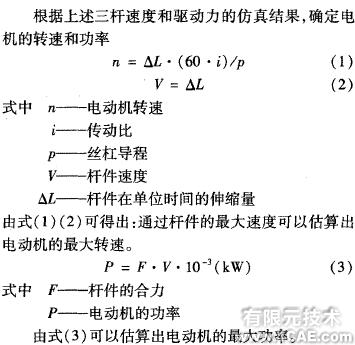
工作空间搜索具体方法如下:第一步:初设置刀尖点1坐标(200,200,-200 ),从1点分别沿±X, ± Y,±Z六个方向平移,在ADAMS软件的后置处理中记录各杆件速度和驱动力,如图4和图5所示,然后比较其大小,找到此点的最大值;第二步:改变刀尖点坐标,增量△X=△Y=△Z=10 mm,重复第一步方法,真到刀尖点坐标移到点5(-200,-200,200)位置上。第三步:统计工作空间内刀尖坐标变化后的所有测量值,找到空间内每个杆件上速度和驱动力最大值,以及速度与驱动力乘积的最大值。经过ADAMS/Measure测得刀具沿± Y方向运动时,杆L2在点1速度最大;杆LI在点2速度最大;刀具沿± Z方向运动时,杆L3在点3速度最大;如图6所示。刀具沿± Z方向运动时,杆L2在工作空间点2驱动力最大;杆L1在点1驱动力最大;杆L3在点4驱动力最大。如图7所示。

4三杆驱动电动机的转速和功率的确定
根据上述三杆速度和驱动力的仿真结果,确定电机的转速和功率

5结语
通过对3-TPS混联机床在ADAMS软件中仿真分析,在混联机床以最大速度0. 5 mls,最大加速度1g的条件下进给时,获得了三个驱动杆的速度变化范围以及三个杆的驱动力变化情况。通过分析仿真的结果,可见机床的三个驱动杆速度变化均匀平稳,驱动力的变化也比较平稳。以多体系统运动学和动力学为基础的ADAMS用来仿真分析混联机床是可行的;仿真结果为构建五轴棍联机床数控系统的速度规划以及驱动电动机的选择提供重要参考。
相关标签搜索:五轴混联机床运动学和动力学仿真 Fluent、CFX流体分析 HFSS电磁分析 Ansys培训 Abaqus培训 Autoform培训 有限元培训 Solidworks培训 UG模具培训 PROE培训 运动仿真




