
拆除机器人整机的模态分析
2013-05-08 by:广州有限元分析、培训中心-1CAE.COM 来源:仿真在线
作者: 王玉飞 岑豫皖 罗铭 包家汉 来源: 万方数据
关键字: 模态分析 有限元法 ANSYS 拆除机器人
拆除机器人是为了适应高温、高辐射、高噪声等恶劣工作环境而开发的一种遥控多功能作业机器人,广泛应用于水泥行业和冶金行业中的拆除工作以及在抢险救援工作中对剧毒化学物质泄漏、核物质泄漏的搬运与处理。对予这样复杂的机械设备,仅仅研究其中单个零部件的机械性能已经不能满足要求,有必要深入地研究其整机的动力学性能。以某型号的拆除机器人为研究对象,首先利用proe软件建立了其三维实体模型,通过proe与ANSYS的接口将其导入ANSYS中,并通过节点耦合的方式处理机构连接,从而建立起了整机的有限元模型,运用lanczos法对该有限元模型进行了求解,获得了整机的前lO阶固有振动频率和模态振型,为进一步进行动力学分析奠定了基础。
工程实际中,几乎所有的设备都处在振动环境中,并以各自特有的形态进行着振动,这不仅有碍产品功能的发挥,而且还会损害操作者的身心健康,污染环境。同时,随着科学技术的发展,产品结构也日趋复杂,对其工作性能的要求也越来越高,为使产品能够安全可靠地工作,必须保证结构系统具有良好的动态特性。因此,必须对机械产品和设备进行动态分析、设计,以满足机械结构静、动态特性要求与低振动、低噪声的要求。
拆除机器人是由许多结构形状复杂的零部件组成的系统,欲研究其整栅眭能,需要分析装配部件的动态特性。同时,拆除机器人工作在强振动环境下,其工作装置为液压冲击器,为确保拆除机器人工作时具有足够的强度和刚度,并确保其激振源频率避开整机的一阶固有频率,同时做到各部件变形最小、振动最小、辐射噪声最小,就需要研究其动态特性,通过抑制振动、优化结构来提高机器人结构的动刚度和动强度,因此有必要对其整机进行模态分析。模态分析属于动态分析的范畴,一般用于确定设计中的结构或部件的振动特性(频率响应和模态),也是其它动力学分析的起点。
1 模态分析理论
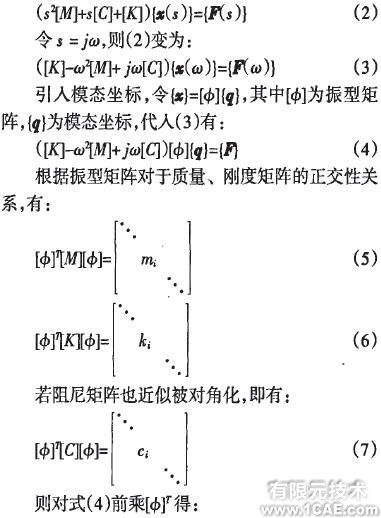
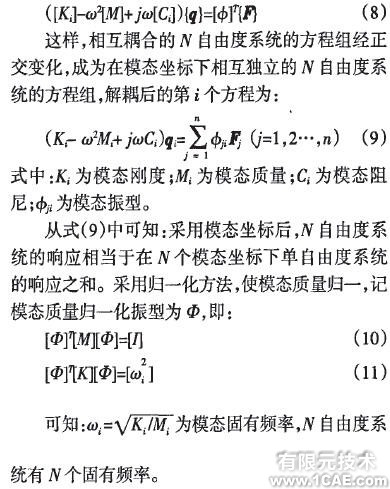
一个N自由度的线性系统,其运动微分方程为:
![]()
式中:[M]为系统的质量;[c]为系统的阻尼;[K]为系统的刚度矩阵;[%]为系统各点的位移响应向量;[F]为系统各点的激励力向量。
式(1)是一组耦合方程,当系统自由度很大时,求解十分困难。将耦合方程变化为非耦合的独立方程组,是模态分析必须解决的问题。模态分析方法就是以无阻尼的各阶主振型所对应的模态坐标来代替物理坐标,使微分方程解耦,变成各个独立的微分方程。对式(1)两边进行拉氏变换,得:
2 实体模型的建立
proe具有强大的实体和曲面造型功能,而AN—SYS具有完善的有限元分析功能,且proe和ANSYS能够完全接口,因此,在这里选用proe进行实体建模,然后将模型导入ANSYS中进行有限元分析[11。虽然ANSYS本身具备三维建模能力,但相比起其它一些专门化的三维造型软件如proe、UG等其建模能力实在太弱,特别是对一些复杂的结构和曲面很难完成建模工作,因此有必要利用专用CAD软件建立实体模型。
采用proe Wildfire2.0构造拆除机器人的三维实体模型。首先构造好每个零部件的模型,在建模过程中删除零件中的一些微小特征如轴承的油孔,螺栓连接的小孔,轴上的定位销、键槽,还有一些微小的倒角特征,同时将行走机构中的履带去除并将其质量加入底盘部分的模型中。这些特征并不影响分析结果的准确性,但在划分网格时微小的特征却对网格的精度要求很高,会增加网格的密度,使计算量成倍的增长,而且计算的准确性并没有因此而提高。再将所有零部件在proe的装配模块中装配为三维实体整机模型(图1)。
3 有限元模型的建立
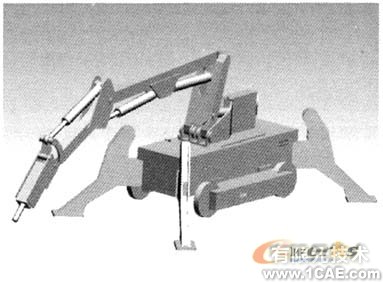
图1 proe中建立的整机实体模型
最终完成的拆除机器人的三维实体模型共有80个零部件,鉴于其结构过于复杂,采用常用的中间数据文件(IGES、DXF或STEP)格式导人ANSYS时出现线和面等几何特征的丢失,导致后续工作无法完成,而ANSYS内嵌了对proe的支持,故此处采用了proe与ANSYS的接口将模型导人ANSYS。
3.1 配置ANSYS—proe接口
ANSYS在默认的状态下是不能对Pm/E中的prt(或asm)文件进行直接转换的。必须通过对AN—SYS进行连接设置以激活模块。
鼠标点击“开始→程序→ANSYS10.0→Utilities→ANS_ADMIN”,选择“Configuration options→OK”,接下来的对话框顺序选取“ConfigurationConnection for proeNGINEER→OK”和“ANSYS Multiphysics&WIN32→OK”。完成后,ANSYS会自动提示已在自己的安装目录中成功生成了config.anscon文件。现在打开proe,如果在“工具”菜单的后面出现一个新菜单“ANSYS 10.0”(如图2所示),就表示已经成功建立了接口。
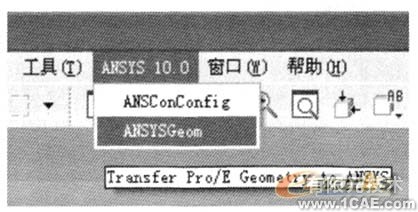
图2 配置完成后的ANSYS-proe接口
接口配置完成后,在proe中打开拆除机器人的模型文件,单击“ANSYS 10.0”菜单下的“ANSYSGeom”,就会自动启动ANSYS进行模型转换。传送完成的拆除机器人实体模型共计有80个体,1378个面,3346条线。
3.2 有限元网格的划分
将需要手工控制网格划分的轴及轴套选出来控制其周向及轴向网格划分数(此处采用SOLIDl86单元)。
其余部件采用自由网格划分(此处采用SOLIDl87单元)并利用Smart Size控制生成的网格质量,整机网格划分完成后共有102106个单元,246563个节点。
3.3 机构联接的处理
机构模态分析中若仅对其中的个别零部件进行分析,无法全面反映其整体性能,特别是在动态分析中,各零部件联接处的参数对其动态性能的影响较大。因此,要想准确而全面地了解复杂结构的动态性能,就必须对其整体进行模态与动力学分析。
与结构相比较,机构是一几何可变体系,随原动件位置不同,机构呈现出不同的几何形状,从而也就具有不同的固有频率和振型嘲。当原动件位置确定后,机构转变成结构,但与一般的结构不同之处在于系统中存在各种运动副联接。虽然各组成运动副的两构件间无大的相对运动,但组成的各柔性体的变形仍会引起运动副发生较小的相对变形,其影响在静力与动力学分析中均不可忽视。
在ANSYS软件中对于由多个零件联接而成的复杂机械结构,联接一般采用以下三种方式进行处理:
(1)利用布尔运算VGLUE,将多个volume粘接到一起。
(2)各自划分网格后,在Volume之间的界面上定义接触单元用。
(3)各自划分网格后,在Volume之间的界面处节点,通过约束方程或耦合实现联接。
若采用体相加或体的粘接方式,或者采用设置接触单元的方式,其实质均为刚性联接,在模态分析中处理铰接等运动副不符合实际情况,造成各阶固有频率增大,有些模态丢失。
在静力分析和瞬态动力分析中,采用接触单元来处理运动副虽然更符合实际,但对复杂结构,计算不易收敛或计算时间漫长,若不需考虑运动副联接处的局部应力与变形,仍可采用耦合或约束的方式来处理运动副。
采用有限元方法计算机构在特定位置和姿态的模态时,对于典型的销轴结构可以建立位于销轴中心的局部柱坐标系,选择销轴外表面与孔内表面所有节点,生成此运动副的节点组件,将节点自由度在局部坐标系中进行转换,每个节点的3个平动自由度转换成径向尺、切向和平行销轴轴线的自由度磊采用销轴连接时,在局部柱坐标系中,转换后各运动副节点组件径向坐标R相同,在运动副节点组件中,根据节点的z坐标和0,循环选择相近的节点,通过CERIG命令约束位置相近的节点径向自由度,保留其切向自由度,使得各节点仍能绕销孑L轴线转动,以此来模拟销轴处的转动副。为限制轴销的轴向运动,还需要耦合其端面的节点。最后约束4个支腿和地面的接触面的所有节点的所有自由度。节点耦合完成后的有限元模型如图3所示。
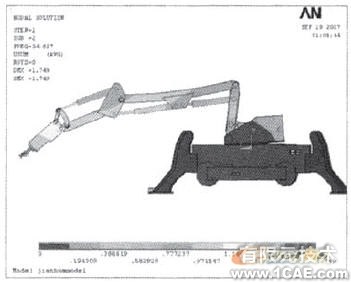
图3 有限元模型
4 有限元模态分析结果
机器人所用材料的弹性模量为![]() ,泊松比0.3,密度
,泊松比0.3,密度![]() 。采用Blocklanczos法求解此模型的前20阶模态频率及振型,并提取前10阶模态,结果如表1所示。限于篇幅,本文只给出了前4阶的模态振型图,如图4一图7所示。由于拆除机器人的激振源的频率为7.5~12.5Hz,最高部分达到了整机的1阶模态频率,因而整机的1阶模态就更加值得关注。从模态分析结果可以看出,其1阶模态振型为整个工作臂作为一个整体在可旋转机座上做横向摆动,主振系统是拆除机器人的工作机构,从振型动画看出拆除机器人的工作装置也就是液压锤的振动幅值很大,因此在日常工作中激振源(液压冲击器)应当尽量避免工作在最高频率下,同时应当考虑加强工作臂的横向动刚度,从而抑制这种振动。
。采用Blocklanczos法求解此模型的前20阶模态频率及振型,并提取前10阶模态,结果如表1所示。限于篇幅,本文只给出了前4阶的模态振型图,如图4一图7所示。由于拆除机器人的激振源的频率为7.5~12.5Hz,最高部分达到了整机的1阶模态频率,因而整机的1阶模态就更加值得关注。从模态分析结果可以看出,其1阶模态振型为整个工作臂作为一个整体在可旋转机座上做横向摆动,主振系统是拆除机器人的工作机构,从振型动画看出拆除机器人的工作装置也就是液压锤的振动幅值很大,因此在日常工作中激振源(液压冲击器)应当尽量避免工作在最高频率下,同时应当考虑加强工作臂的横向动刚度,从而抑制这种振动。
表1 拆除机器人的前10阶固有频率及振型描述
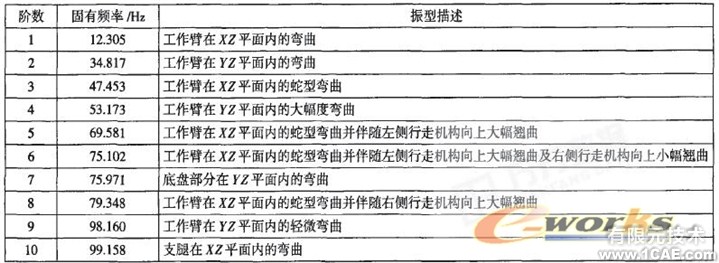
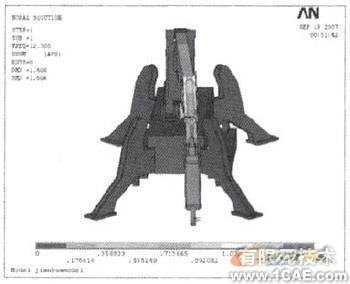
图4 1阶振型图
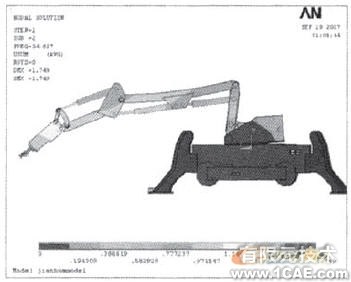
图5 2阶振型图
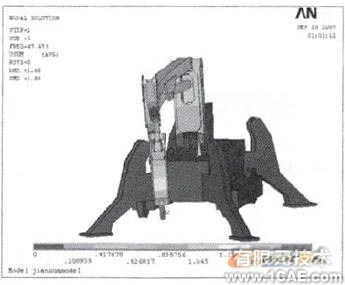
图6 3阶振型图
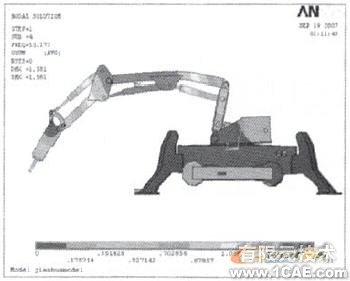
图7 4阶振型图
5 结束语
(1)采用ANSYS软件对此整机有限元模型进行了模态分析,求出了拆除机器人整机前10阶固有频率与振型。
(2)拆除机器人的激振源(液压冲击器)的频率为7.5~12.5Hz,而其1阶模态频率为12.305Hz,正好处于这一区间,这说明在拆除机器人工作在最高工作频率的时候,极易诱发其1阶模态,因此需要对其结构进行相应的改进,以避开其1阶固有频率,提高整机的动力学特性。
(3)通过耦合销轴节点自由度的方法,模拟销轴联接,进行机构模态分析,但这种方法没有考虑销轴结合面的阻尼对机构的模态的影响,如何更加准确的考虑这些影响值得进一步探讨。
相关标签搜索:拆除机器人整机的模态分析 Ansys有限元培训 Ansys workbench培训 ansys视频教程 ansys workbench教程 ansys APDL经典教程 ansys资料下载 ansys技术咨询 ansys基础知识 ansys代做 Fluent、CFX流体分析 HFSS电磁分析 Abaqus培训




