
案例分享 | 机器人设计中的多体动力学分析
2018-05-14 by:CAE仿真在线 来源:互联网
机器人作为一类典型的现代复杂产品,其设计过程中面临着诸多的挑战,需要更多、更复杂的决策。显然,设计阶段早期通过CAE分析预测得到的可靠信息对于设计人员的决策具有极其重要的作用,尤其在研机器人的物理样机尚未产生之前,通过机器人数字样机可以将诸多设计思想快速地付诸于可视化验证,为设计决策提供分析依据。
MBD for ANSYS PLUS产品线的多体动力学仿真分析作为一种CAE手段,可对机械产品全面地进行系统级的仿真,其先进的MFBD技术在仿真机械人零部件刚度对于机器人精度影响方面具有重要的作用,其机械-控制一体化仿真技术对于验证机器人执行机构与控制系统的协同性高效、便捷。下面分享一些MBD for ANSYS PLUS产品线产品在机器人性能仿真中的应用。

验证机器人的功能【MBD for ANSYS / RecurDyn 】
-
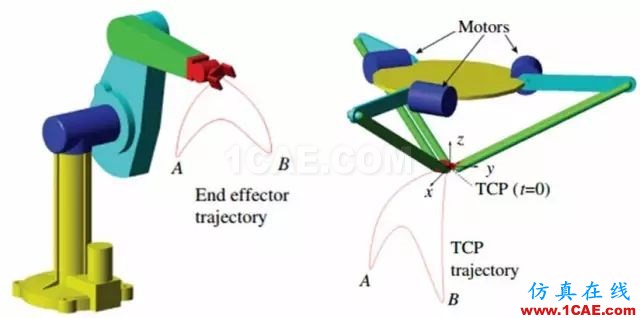
可根据作业运动功能的要求,确定机器人末端执行器应达到的位置轨迹线和姿态
-
通过给出各关节运动量,求出机器人的实际工作空间及姿态
-
可分析构件的速度和加速度,分析末端执行器上所夹持的工件角速度分析
-
分析机器人各关节位置的受力
(动画:焊接机器人路径分析)
验证柔性部件对机器人性能的影响【RecurDyn MFBD Package】
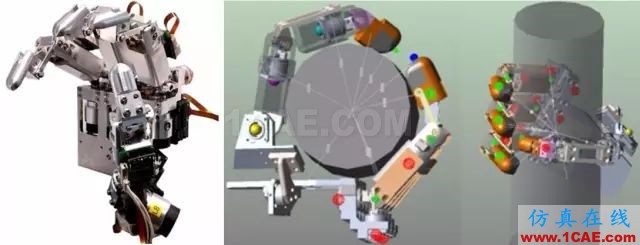
设计要求机械手臂的结构和尺寸应满足机器人完成作业任务提出的工作空间要求,在设计要求约束下的手臂运动响应速度能否达到精确性和刚度的要求,可通过MBD for ANSYS PLUS产品线中RecurDyn/F-FLEX模块,建立刚柔混合机器人数字样机模型进行验证。比如:验证手腕回转各关节轴上要设置限位开关和机械挡块能否防止关节超限造成事故?验证末端执行器是否能完成夹持任务?验证末端执行器对夹持物的加持力是否会造成受损?验证并联机器人机座结构在机器人工作时的稳定性、强度、刚度、承载能力以及机座轴系及传动链的精度和刚度对末端执行器的运动精度影响。
(动画:并联机器人)
验证机器人机械-控制系统的协同【RcurDyn Control/Co-link,RecurDyn Toolkits】
机器人执行机构从控制系统得到动作指令,执行机构将动作信息反馈给控制系统,这个交互过程的信息是动态时变的,单纯的假定机械反馈来设计控制系统,或者假定控制信息来设计执行机构,实际上将耦合发生的事件人为分割为两个部分不易验证机器人执行机构与控制系统协同,通过机电控数字样机可以仿真验证机械与控制之间的匹配性,比如执行特种任务的履带式机器人在控制指令下的爬坡机动性分析。
(动画:履带机器人)
应用于辅助不同用途、不同形态的机器人研发
1) 节能机器人轨迹优化
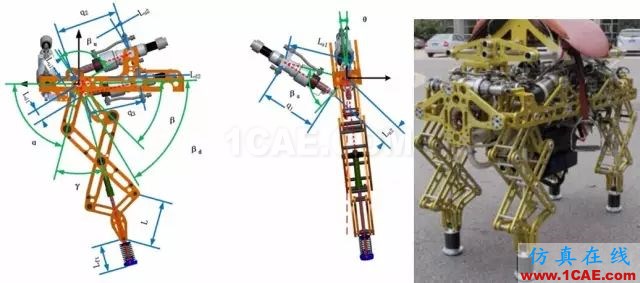
2) 高负载四足机器人外部干扰力和力矩确定
3) 确定13自由度手指型机器人的手指关节转矩
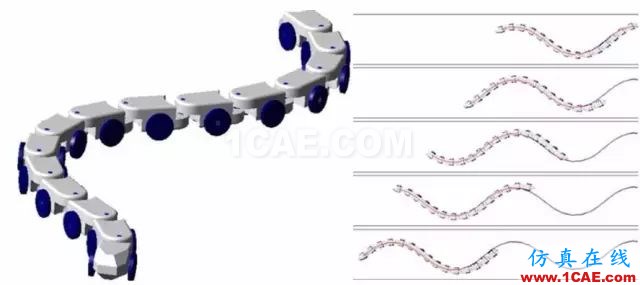
4) 验证基于CPG控制结构的频率自适应蛇形机器人以恒定速度在不同摩擦系数的地形移动性能
5) 皮带驱动柔性多体动力学大型太阳能电池板搬运机器人设计开发


相关标签搜索:案例分享 | 机器人设计中的多体动力学分析 Ansys有限元培训 Ansys workbench培训 ansys视频教程 ansys workbench教程 ansys APDL经典教程 ansys资料下载 ansys技术咨询 ansys基础知识 ansys代做 Fluent、CFX流体分析 HFSS电磁分析 Abaqus培训




